Để trải nghiệm trọn vẹn những tính năng thông minh, linh hoạt của biến tần, bạn nên hiểu cơ bản về các chế độ điều khiển của biến tần. Bài viết sau đây sẽ cung cấp cho bạn kiến thức tổng quát về chế độ điều khiển V/F; chế độ điều khiển vector vòng hở và vòng kín trên biến tần; chế độ điều khiển Torque vòng hở và kín.
1. Chế độ điều khiển V/F
V/F là chế độ điều khiển cơ bản và phổ biến ở tất cả các loại biến tần. Dựa theo nguyên tắc moment xoắn trên trục động cơ không đồng bộ phụ thuộc vào tỉ lệ tần số và điện áp nguồn cấp, vì thế mục đích của chế độ trên là điều khiển tỉ lệ V/F = hằng số.
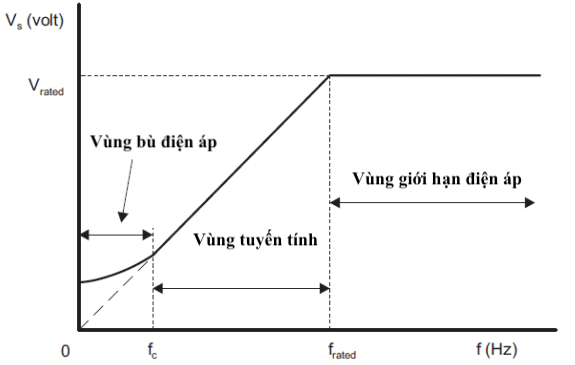
Trong chế độ này, biến tần điều khiển tần số theo dải 0Hz – Fmax và tương ứng điện áp theo dải 0V – Vmax. Trên thực tế, tỉ lệ giữa tần số và điện áp được chia theo 3 dải tốc độ:
- Từ 0hz đến F khởi động (hz): Điện áp cấp vào thấp suy ra dòng khởi động thấp dẫn đến động cơ không đủ momen để khởi động, vì vậy việc bù điện áp được thực hiện dẫn đến tỉ lệ V/F không tuyến tính.
- Từ F khởi động (hz) đến F định mức (hz): tỷ lệ V/F tuyến tính vì thế momen động cơ ổn định.
- F hoạt động (hz) > F định mức (hz): điện áp bị giới hạn tại điện áp định mức vì tránh sự cố phá vỡ cách điện giữa các dây quấn. Do đó, momen động cơ bị giảm.
Đối với động cơ không đồng bộ, tốc độ trên trục động cơ luôn tồn tại hệ số trượt s. Khi động cơ hoạt động không tải, hệ số trượt s rất nhỏ vì thế tốc độ động cơ gần bằng tốc độ của từ trường quay. Khi động cơ hoạt động có tải, hệ số trượt lớn, chế độ V/F sẽ không chính xác vì thế độ bù trượt được áp dụng để cải thiện yếu tố trên.
2. Chế độ điều khiển vector vòng hở và vòng kín trên biến tần
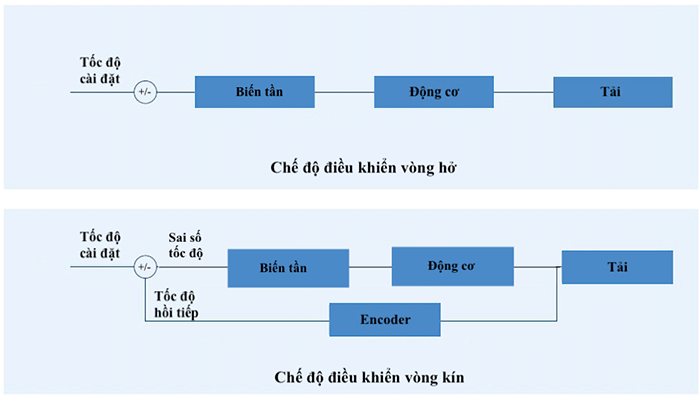
Chế độ điều khiển vector vòng hở (open loop vector control) và vòng kín (close loop vector control) có tính chính xác cao hơn chế độ V/F.
- Chế độ vòng hở (sensorless vector control): là phương pháp điều khiển dựa trên dòng điện hồi tiếp từ động cơ, biến tần sẽ giả lập một vector từ trường quay và điều khiển các thông số tần số, điện áp để điều khiển chính xác tốc độ động cơ.
- Chế độ vòng kín: là phương pháp điều khiển dựa trên xây dựng vector từ trường quay bên trong động cơ. Xác định tốc độ từ trường dựa theo tốc độ thực tế trên trục động cơ thông qua encoder. Dựa vào tín hiệu encoder hồi tiếp, biến tần sẽ điều khiển các thông số tần số, điện áp, tần số sóng mang để điều khiển chính xác tốc độ động cơ.
3. Chế độ điều khiển Torque vòng hở và kín
Công thức tính Torque do động cơ sinh ra:
T(Nm) = 9550 x P(kW)/n(rpm)
Trong đó: P là công suất động cơ, n là tốc độ động cơ
Biến tần điều khiển động cơ chạy Torque nghĩa là điều khiển momen động cơ phát ra chính xác theo yêu cầu. Để thực hiện điều đó, biến tần cần tính toán lực kéo tải và thời gian tăng/giảm tốc sao cho công suất P không đổi. Vì thế khi lực Torque tỉ lệ nghịch với tốc độ nghĩa là kéo tải nặng chạy tốc độ thấp và tải nhẹ chạy tốc độ cao.
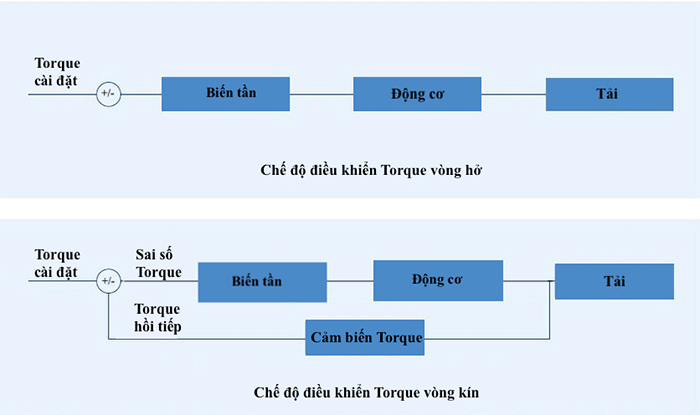
Chế độ điều khiển Torque trong biến tần gồm 2 phương pháp: Torque vòng hở và Torque vòng kín:
- Chế độ Torque vòng hở: biến tần dựa vào dòng điện và điện áp hồi tiếp của động cơ sẽ tự động tính toán nội suy giá trị momen tại đầu trục động cơ. Dựa vào giá trị setpoint moment ban đầu, biến tần sẽ điều chỉnh momen động cơ theo mong muốn. Do tính chất nội suy momen không đạt độ chính xác cao nên chỉ áp dụng cho các ứng dụng không yêu cầu tính chính xác cao.
- Chế độ Torque vòng kín: biến tần sẽ dựa vào dòng điện và điện áp hồi tiếp của động cơ và tốc độ dựa vào tín hiệu encoder từ đó sẽ điều chỉnh chính xác momen động cơ và áp dụng đối với các ứng dụng yêu cầu tính chính xác cao.